1、k1=1;
k2=5;
k3=0.2;
t=0:0.01:15;

2、%原系统
num0=[k1*k2];
den0=[1 1 k1*k2];
sys0=tf(num0,den0);

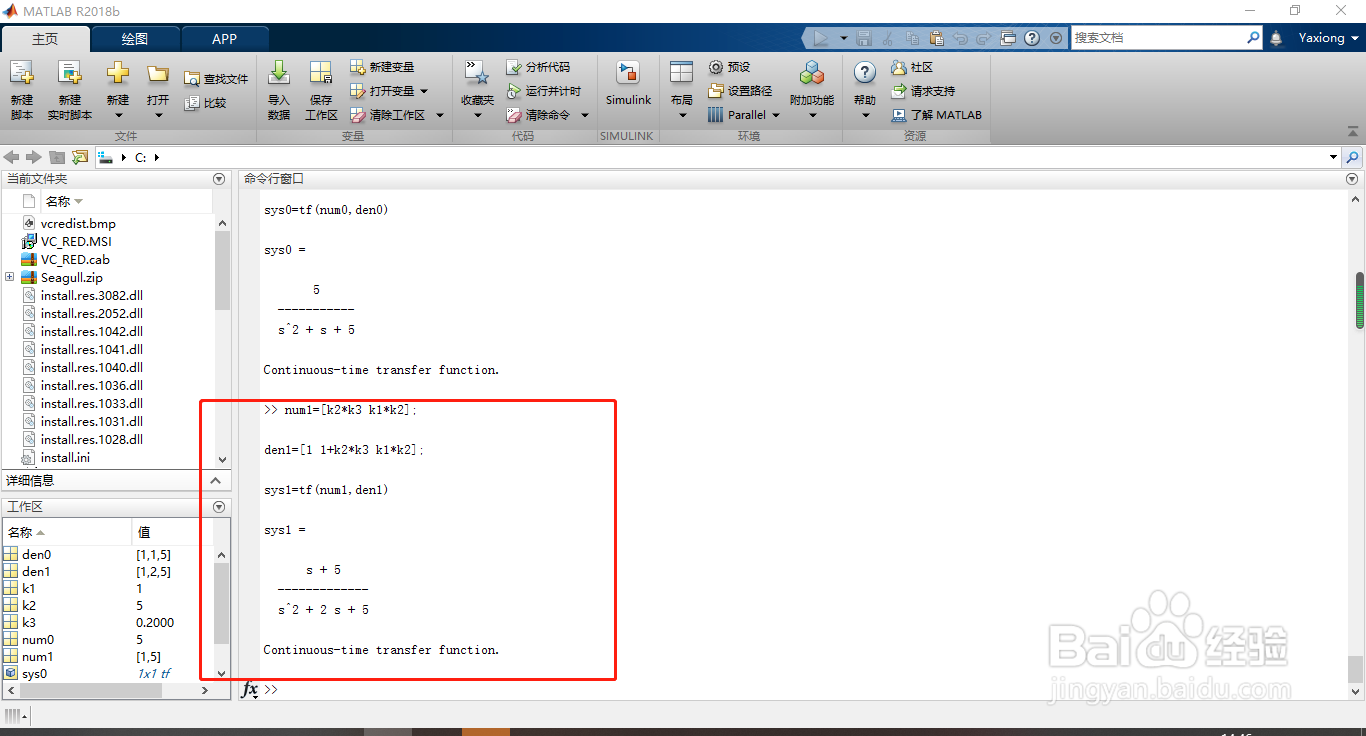
3、%比例-微分系统
num1=[k2*k3 k1*k2];
den1=[1 1+k2*k3 k1*k2];
sys1=tf(num1,den1);
4、%比例-微分系统 为了减小稳态误差 增大k1
k1=2;
k2=5;
k3=0.2;
num2=[k2*k3 k1*k2];
den2=[1 1+k2*k3 k1*k2];
sys2=tf(num2,den2);

5、%比例-微分系统 为了减小稳态误差 增大k2
k1=1;
k2=15;
k3=0.2;
num3=[k2*k3 k1*k2];
den3=[1 1+k2*k3 k1*k2];
sys3=tf(num3,den3);

6、%求取各系统的单位阶跃响应
figure(1)
step(sys0,t);grid
figure(2)
step(sys1,t);grid
figure(3)
step(sys2,t);grid
figure(4)
step(sys3,t);grid

